
In this example we connect a ADXL345 accelerometer to an Adafruit Feather M0 running Circuitpython
First lets look at some information about the sensor from the manufacturer
Sensor Information
The ADXL345 is a small, thin, low power, 3-axis accelerometer with high resolution (13-bit) measurement at up to ±16g. Digital output data is formatted as 16-bit twos complement and is accessible through either a SPI (3- or 4-wire) or I2C digital interface.
The ADXL345 is well suited for mobile device applications. It measures the static acceleration of gravity in tilt-sensing applications, as well as dynamic acceleration resulting from motion or shock. Its high resolution (4 mg/LSB) enables measurement of inclination changes less than 1.0°.
Several special sensing functions are provided. Activity and inactivity sensing detect the presence or lack of motion and if the acceleration on any axis exceeds a user-set level. Tap sensing detects single and double taps.
Free-fall sensing detects if the device is falling. These functions can be mapped to one of two interrupt output pins. An integrated, patent pending 32-level first in, first out (FIFO) buffer can be used to store data to minimize host processor intervention.
Low power modes enable intelligent motion-based power management with threshold sensing and active acceleration measurement at extremely low power dissipation.
This was my sensor of choice that I used

Parts Required
| Name | Link |
| Adafruit Feather M0 Express | Amazon link |
| ADXL345 | Amazon.com linkAmazon link |
| Connecting cables | Aliexpress product link |
Schematic/Connection
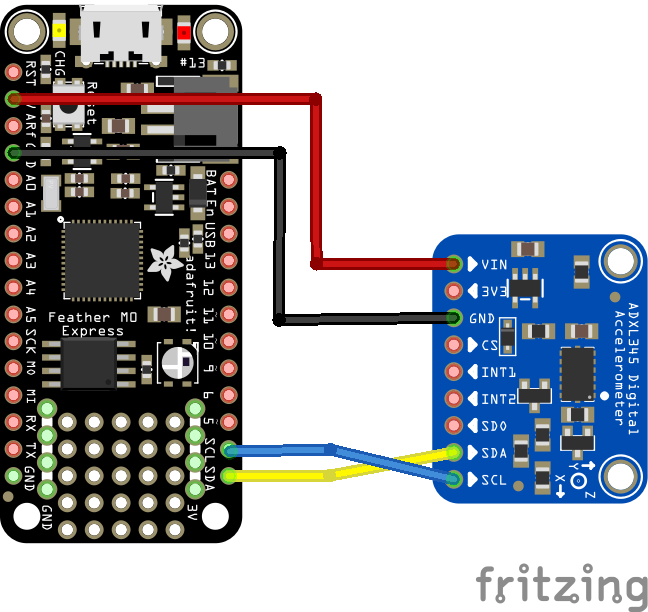
feather and ADXL345 layout
Code Example
I used Mu for development
The following is based on a library , I copied the adafruit_adxl34x library for this device to the lib folder on my Feather M0 Express – https://circuitpython.org/libraries
This is the basic example which comes with the library
[codesyntax lang=”python”]
import time
import board
import busio
import adafruit_adxl34x
i2c = busio.I2C(board.SCL, board.SDA)
# For ADXL343
accelerometer = adafruit_adxl34x.ADXL343(i2c)
# For ADXL345
# accelerometer = adafruit_adxl34x.ADXL345(i2c)
while True:
print("%f %f %f" % accelerometer.acceleration)
time.sleep(0.2)
[/codesyntax]
Output
Here is what I saw in Mu REPL window
16.788971 -5.138680 14.239244
8.119900 16.122116 1.372930
5.727077 -0.353039 5.217134
-1.216024 8.904434 -13.493942
20.044777 9.257469 20.044777
8.080673 -3.687298 -4.511055
11.846421 20.044777 18.279587
Code 2 : Motion Detection example
And another example
[codesyntax lang=”python”]
import time
import board
import busio
import adafruit_adxl34x
i2c = busio.I2C(board.SCL, board.SDA)
# For ADXL343
accelerometer = adafruit_adxl34x.ADXL343(i2c)
# For ADXL345
# accelerometer = adafruit_adxl34x.ADXL345(i2c)
accelerometer.enable_motion_detection()
# alternatively you can specify the threshold when you enable motion detection for more control:
# accelerometer.enable_motion_detection(threshold=10)
while True:
print("%f %f %f" % accelerometer.acceleration)
print("Motion detected: %s" % accelerometer.events["motion"])
time.sleep(0.5)
[/codesyntax]
Links
https://www.analog.com/media/en/technical-documentation/data-sheets/ADXL345.pdf