
In this example we connect a BMP180 barometric pressure sensor to an ESP32 running Micropython
The BMP180 is the new digital barometric pressure sensor of Bosch Sensortec, with a very high performance, which enables applications in advanced mobile devices, such as smartphones, tablet PCs and sports devices. It follows the BMP085 and brings many improvements, like the smaller size and the expansion of digital interfaces.
The ultra-low power consumption down to 3 μA makes the BMP180 the leader in power saving for your mobile devices. BMP180 is also distinguished by its very stable behavior (performance) with regard to the independency of the supply voltage.
Applications
– Indoor navigation
– GPS-enhancement for dead-reckoning, slope detection, etc.
– Sport devices, e.g. altitude profile
– Weather forecast
– Vertical velocity indication (rise/sink speed)
| Parameter | Technical data |
|---|---|
| Pressure range | 300 … 1100 hPa |
| RMS noise expressed in pressure | 0.06 hPa, typ. (ultra low power mode) 0.02 hPa, typ. (ultra high resolution mode) |
| RMS noise expressed in altitude | 0.5 m, typ. (ultra low power mode) 0.17 m, typ. (ultra high resolution mode) |
| Relative accuracy pressure VDD = 3.3 V |
950 … 1050 hPa/ ±0.12 hPa @ 25 °C/ ±1.0 m 700 … 900 hPa/ ±0.12 hPa 25 … 40 °C/ ±1.0 m |
| Absolute accuracy p = 300…1100hPa (Temperature = 0…+65°C, VDD = 3.3. V) |
Pressure: -4.0 … +2.0 hPa Temperature: ±1 °C, typ. |
| Average current consumption (1 Hz data refresh rate)
Peak current |
3 μA, typical (ultra-low power mode) 32 μA, typical (advanced mode) 650 μA, typical |
| Stand-by current | 1.62 … 3.6 V |
| Supply voltage VDDIO | 1.62 … 3.6 V |
| Supply voltage VDD | 1.8 … 3.6 V |
| Operation temp. Range full accuracy” |
-40 … +85 °C 0 … +65 °C |
| Pressure conv. Time | 5 msec, typical (standard mode) |
| I²C date transfer rate | 3.4 MHz, max. |
Parts List
Connection
An easy module to connect to an ESP32, SCL is 22 and SDA is 21 on the Wemos board I used, you can see this is the schematic below
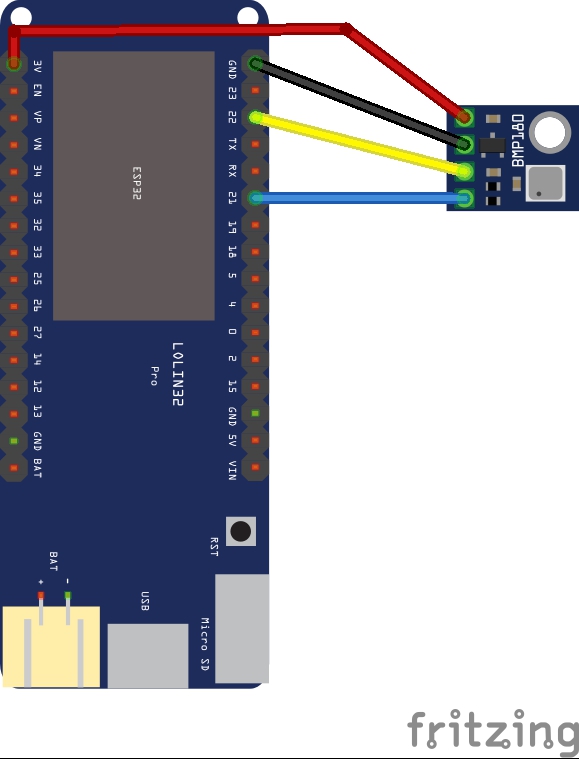
esp32 and bmp180
Code
You can use any method to upload files or an IDE for development, I used uPyCraft to u
The following is based on a github library – just search for Micropython bmp180. The first part of this is the library which I upload to my ESP32
This is the library called bmp180.py
[codesyntax lang=”python”]
rom ustruct import unpack as unp
from machine import I2C, Pin
import math
import time
# BMP180 class
class BMP180():
'''
Module for the BMP180 pressure sensor.
'''
_bmp_addr = 119 # adress of BMP180 is hardcoded on the sensor
# init
def __init__(self, i2c_bus):
# create i2c obect
_bmp_addr = self._bmp_addr
self._bmp_i2c = i2c_bus
self._bmp_i2c.start()
self.chip_id = self._bmp_i2c.readfrom_mem(_bmp_addr, 0xD0, 2)
# read calibration data from EEPROM
self._AC1 = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xAA, 2))[0]
self._AC2 = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xAC, 2))[0]
self._AC3 = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xAE, 2))[0]
self._AC4 = unp('>H', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xB0, 2))[0]
self._AC5 = unp('>H', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xB2, 2))[0]
self._AC6 = unp('>H', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xB4, 2))[0]
self._B1 = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xB6, 2))[0]
self._B2 = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xB8, 2))[0]
self._MB = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xBA, 2))[0]
self._MC = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xBC, 2))[0]
self._MD = unp('>h', self._bmp_i2c.readfrom_mem(_bmp_addr, 0xBE, 2))[0]
# settings to be adjusted by user
self.oversample_setting = 3
self.baseline = 101325.0
# output raw
self.UT_raw = None
self.B5_raw = None
self.MSB_raw = None
self.LSB_raw = None
self.XLSB_raw = None
self.gauge = self.makegauge() # Generator instance
for _ in range(128):
next(self.gauge)
time.sleep_ms(1)
def compvaldump(self):
'''
Returns a list of all compensation values
'''
return [self._AC1, self._AC2, self._AC3, self._AC4, self._AC5, self._AC6,
self._B1, self._B2, self._MB, self._MC, self._MD, self.oversample_setting]
# gauge raw
def makegauge(self):
'''
Generator refreshing the raw measurments.
'''
delays = (5, 8, 14, 25)
while True:
self._bmp_i2c.writeto_mem(self._bmp_addr, 0xF4, bytearray([0x2E]))
t_start = time.ticks_ms()
while (time.ticks_ms() - t_start) <= 5: # 5mS delay
yield None
try:
self.UT_raw = self._bmp_i2c.readfrom_mem(self._bmp_addr, 0xF6, 2)
except:
yield None
self._bmp_i2c.writeto_mem(self._bmp_addr, 0xF4, bytearray([0x34+(self.oversample_setting << 6)]))
t_pressure_ready = delays[self.oversample_setting]
t_start = time.ticks_ms()
while (time.ticks_ms() - t_start) <= t_pressure_ready:
yield None
try:
self.MSB_raw = self._bmp_i2c.readfrom_mem(self._bmp_addr, 0xF6, 1)
self.LSB_raw = self._bmp_i2c.readfrom_mem(self._bmp_addr, 0xF7, 1)
self.XLSB_raw = self._bmp_i2c.readfrom_mem(self._bmp_addr, 0xF8, 1)
except:
yield None
yield True
def blocking_read(self):
if next(self.gauge) is not None: # Discard old data
pass
while next(self.gauge) is None:
pass
@property
def oversample_sett(self):
return self.oversample_setting
@oversample_sett.setter
def oversample_sett(self, value):
if value in range(4):
self.oversample_setting = value
else:
print('oversample_sett can only be 0, 1, 2 or 3, using 3 instead')
self.oversample_setting = 3
@property
def temperature(self):
'''
Temperature in degree C.
'''
next(self.gauge)
try:
UT = unp('>H', self.UT_raw)[0]
except:
return 0.0
X1 = (UT-self._AC6)*self._AC5/2**15
X2 = self._MC*2**11/(X1+self._MD)
self.B5_raw = X1+X2
return (((X1+X2)+8)/2**4)/10
@property
def pressure(self):
'''
Pressure in mbar.
'''
next(self.gauge)
self.temperature # Populate self.B5_raw
try:
MSB = unp('B', self.MSB_raw)[0]
LSB = unp('B', self.LSB_raw)[0]
XLSB = unp('B', self.XLSB_raw)[0]
except:
return 0.0
UP = ((MSB << 16)+(LSB << 8)+XLSB) >> (8-self.oversample_setting)
B6 = self.B5_raw-4000
X1 = (self._B2*(B6**2/2**12))/2**11
X2 = self._AC2*B6/2**11
X3 = X1+X2
B3 = ((int((self._AC1*4+X3)) << self.oversample_setting)+2)/4
X1 = self._AC3*B6/2**13
X2 = (self._B1*(B6**2/2**12))/2**16
X3 = ((X1+X2)+2)/2**2
B4 = abs(self._AC4)*(X3+32768)/2**15
B7 = (abs(UP)-B3) * (50000 >> self.oversample_setting)
if B7 < 0x80000000:
pressure = (B7*2)/B4
else:
pressure = (B7/B4)*2
X1 = (pressure/2**8)**2
X1 = (X1*3038)/2**16
X2 = (-7357*pressure)/2**16
return pressure+(X1+X2+3791)/2**4
@property
def altitude(self):
'''
Altitude in m.
'''
try:
p = -7990.0*math.log(self.pressure/self.baseline)
except:
p = 0.0
return p
[/codesyntax]
Now you either update main.py or create it with the following code
[codesyntax lang=”python”]
from bmp180 import BMP180
from machine import I2C, Pin # create an I2C bus object accordingly to the port you are using
#bus = I2C(1, baudrate=100000) # on pyboard
bus = I2C(scl=Pin(22), sda=Pin(21), freq=100000) # on esp8266
bmp180 = BMP180(bus)
bmp180.oversample_sett = 2
bmp180.baseline = 101325
temp = bmp180.temperature
p = bmp180.pressure
altitude = bmp180.altitude
print("Temperature: ",temp)
print("Pressure: ",p)
print("Altitude: ",altitude)
[/codesyntax]
Testing
Open up the REPL window. Here is what I saw in uPyCraft
Ready to download this file,please wait!
….
download ok
exec(open(‘./main.py’).read(),globals())
Temperature: 19.65517
Pressure: 98344.88
Altitude: 238.5229